



1
2
3
4
5
6
7
8

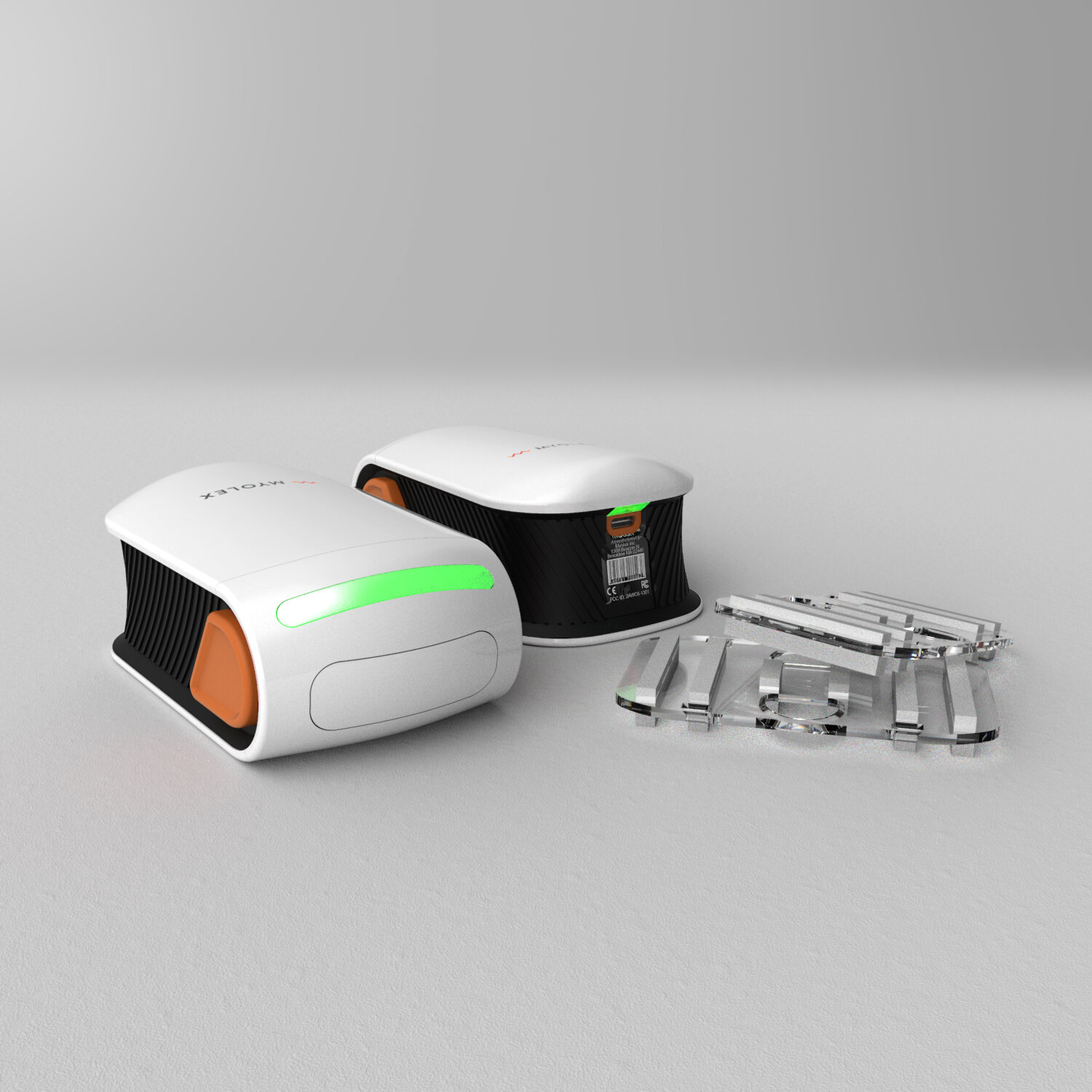
Myolex Mscan
Myolex develops core technologies that help physicians and therapists measure and assess muscle condition for a broad range of applications. Starting with that core technology, I worked with Myolex and a local design firm Lexicon to develop a fully hand-held encapsulation of their product. The device is easy and comfortable to hold and operate, and included replaceable “click-in” cartridges which facilitate reading of the muscle signals.
Hibersense
Hibersense is a Pittsburgh based startup, founded by a group of Pitt students and professor aimed at creating a true micro-climate system that can be installed in any home or office layout. I started working with the team during their early years and continue assisting them to this day. I helped Hibersense develop their sensors and vent automation packages, the core products of their system, developing their user interaction, through manufacturing design including sourcing and connection with a range of necessary suppliers for small custom electronic components and the custom injection molded enclosures.
Aeronics - Pawprint Oxygen
Aeronics is a company founded by two Pitt graduates who developed a safe way of densely storing oxygen in an aerosol-like container. Their initial focus was on recreational and military applications, which they are still pursuing, but discovered a significant need in the veterinary space for quick, lightweight, and mobile oxygen supply. With that target market in mind, I was able to help quickly develop a plastic quick-release regulator system based on components they had already been using and producing for their other markets. I continue to work with Aeronics to this day helping to refine and streamline their production and assembly processes alongside new product development.
Integrated Industrial Technologies
I2T is a well established Industrial Automation company with years of experience delivering exceptional custom robotic and vision solutions for a wide variety of industries. Over the years, they have broadened their reach into the mechanical realm where I have been able to support them on larger projects requiring large-scale system-development and project management. In addition to base level CAD design, I helped them establish intuitive part numbering and version control schemes for use across the board of their project portfolio.
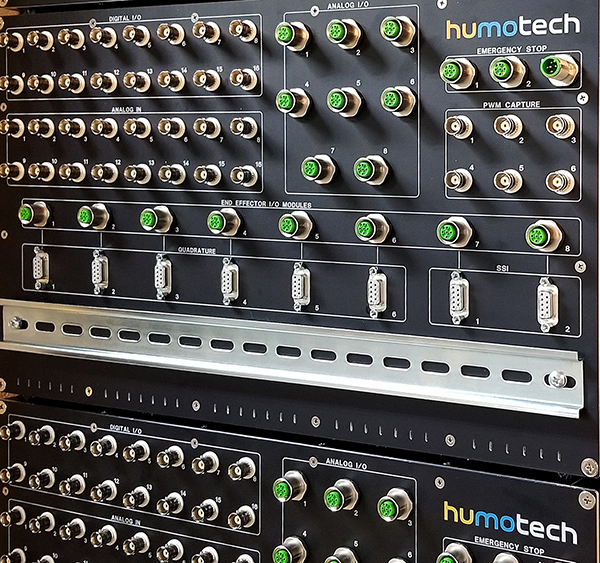
Human Motion Technologies
HuMoTech is a spin-out company based on research from the CMU Biomechatronics Laboratory focusing on enhanced ankle-foot prosthesis and data collection. As a recent startup, I was able to help accelerate their development cycle by focusing on the necessary supporting units, such as the development of the Caplex Control System Unit to house all of their unique computing needs and present the necessary connectors in a layout which easy to read and access as well as sourcing or designing all necessary components for the unit.
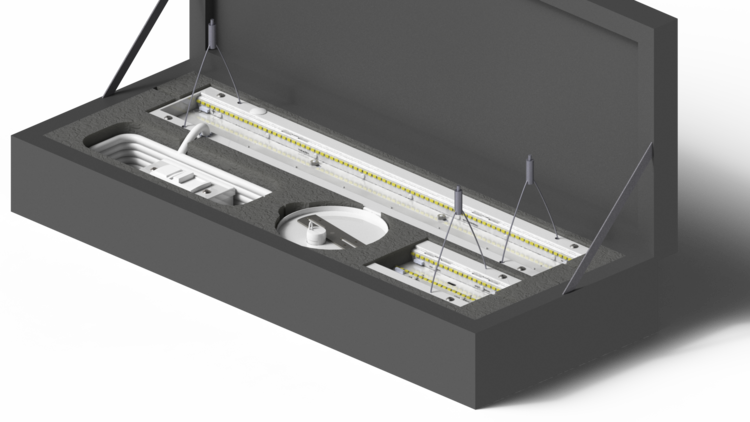
Forum Lighting
What was originally a manual, time-consuming, custom design process, I was able to automate using built in tools in Solidworks covering the creation of drawings and documentation for 99% of customer orders. I was approached to design a new product line given the requirement that it would be our cheapest linear fixture. Working from the previous standardization work, I created an incredibly modular fixture supporting thousands of configurations with only a dozen unique manufactured parts.
ProtoInnovations
This group develops robotic platforms designed for extra planetary roving. I assisted with the upkeep and reconfiguration of these platforms through various testing scenarios, during which I also developed a design for a robotic anchoring mechanism intended for use on Mars to enable the scaling and surveying of steep terrain.
National Robotics Engineering Center
The APD vehicle was built as a successor to the Crusher robot, also built at NREC. This Vehicle is designed to run over any terrain and is driven by a teleoperations team. For this project, I was responsible for developing a variety of smaller systems and tests for the internal cooling system as well as supporting the testing team on location during desert demonstrations.